Lidar-based navigation driving on F1tenth Car
Introduction
This part is about my experience working with Hokuyo UTM-30LX Lidar and tested my Lidar-based navigation ROS nodes on the physical F1tenth car.
The primitive car we got:
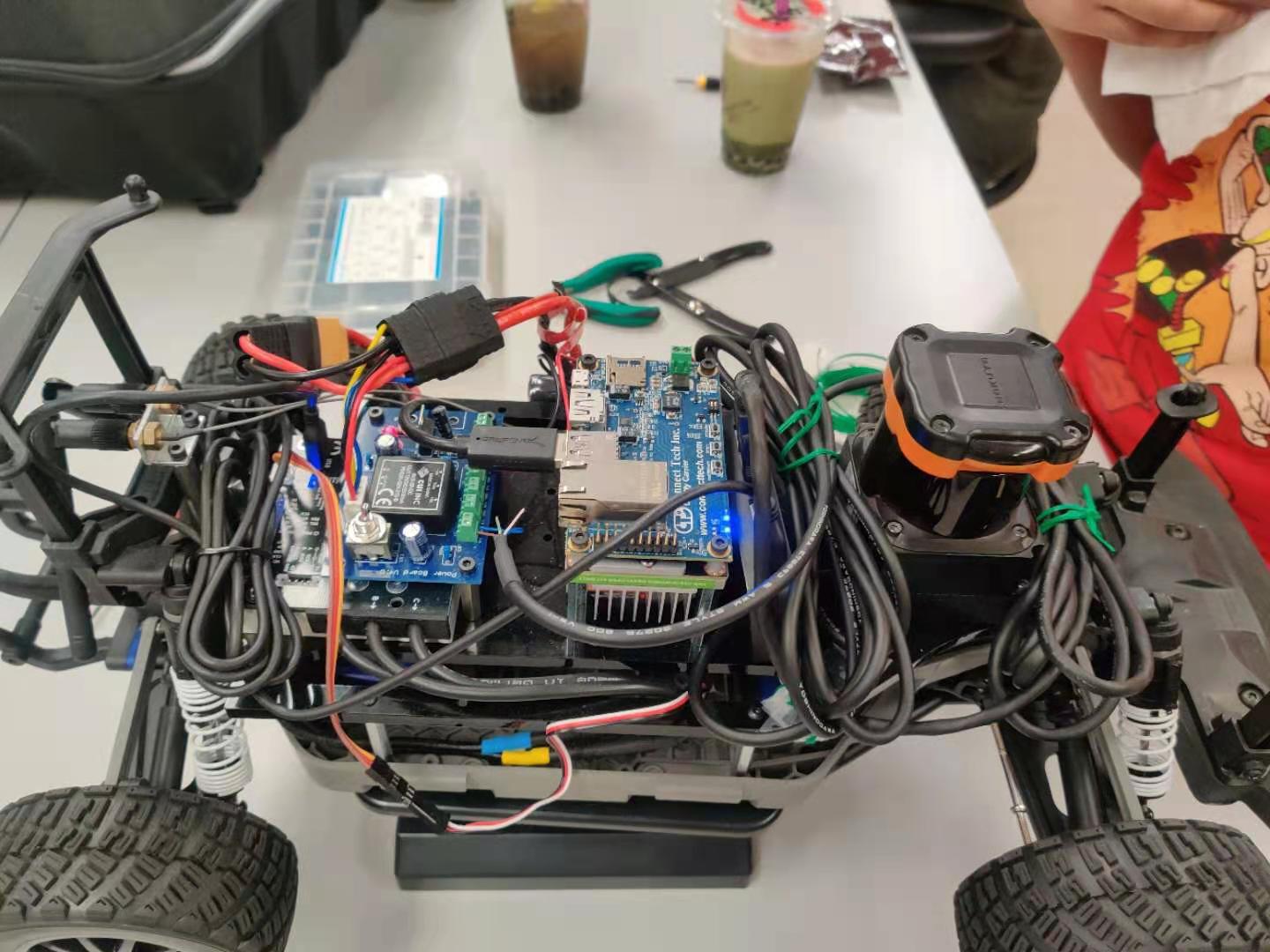
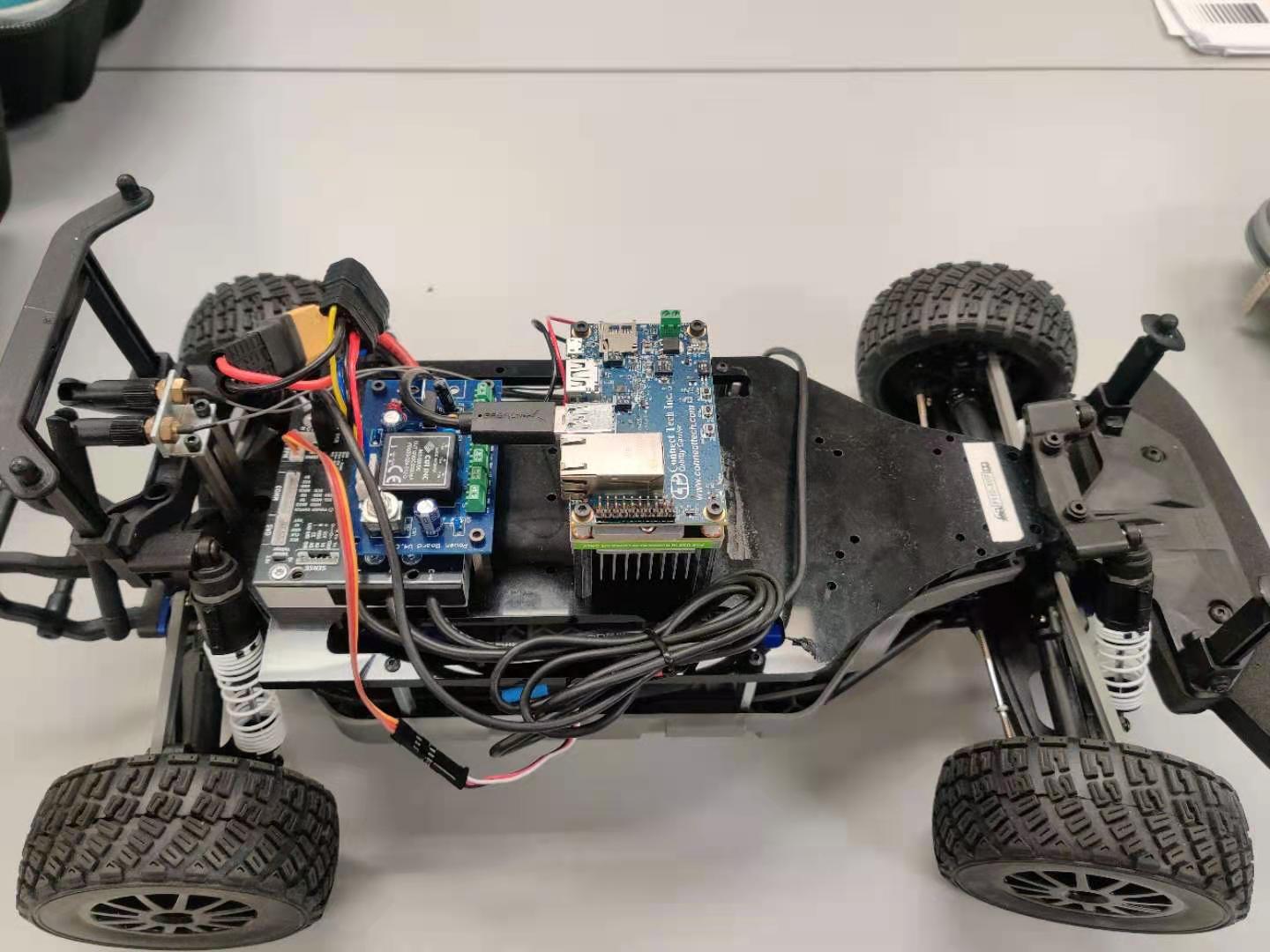 Hardware installation:
Hardware installation:
Real Sim Gap
- 1: The Hokuyo UTM-30LX Lidar only got 270 degrees. By defult, the scan range setting in the Hokuyo Node is [-90,90] degrees which can’t satisfy my need when implementing the wall following algorithm. Therefore, I need to change its setting to [-135,135] degrees. In addition, in F1Tenth Simulator, I was able to work with a simulated Lidar which is of 360 degrees. However, when dealing with hardware, I need to pay attention to the limitation of the physical sensors.
- 2: To communicate my remote computer to the robot computer, I used ssh. The image topics can not be transmitted to the remote computer by simple ssh. I need to export my ROS Master and ROS URL.
- 3:
Continue Updating
Follow the Wall Demo
The reactive planning node is written with rospy.