ROS Notes
Brief Notes
Since I have worked with ROS before, so I wouldn’t expand too much on intro of ROS. After accomplishing lab 1 using both C++ and Python and going through all the written questions in the lab 1, I have the following notes:
- note 1: CmakeLists is a generator of build systems, it can produce MakeFiles; while Make(or rather MakeFiles) is a build system which drives the compiler and other build tools to build your code.
- note 2: source ~/overlay_ws/devel/setup.bash is to overlay your package in the overlay_ws workspace on top of the packages installed in /opt/ros/melodic. It is a good practice to check the ROS_PACKAGE_PATH if errors like pakage not found was throwed.
- note 3: There is no spinOnce in rospy, only in roscpp
- note 4: There is no need to run catkin_make if you write the node in .py file. However, you need to make sure it is executable my using the command: chmod +x your_node.py
- note 5: If not specified the path when using rosbag record in the launch file, the files are saved under the default directory ~/.ros
- note 6: Using -o will output a bag file with the timestamp at the location you specify; Using -O will output a bag file without the timestamp at the location you specify
- note 7:
A good pratice for dealing with LaserScan info
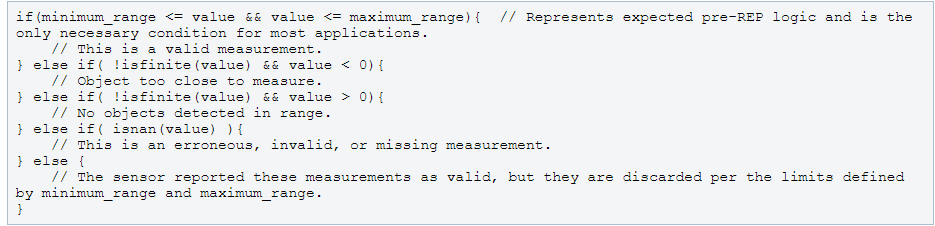
- note 8:
Continue updating with progress of the f1tenth project